Be careful when using it at the first time, for example, you can use an old PEI plate for testing.
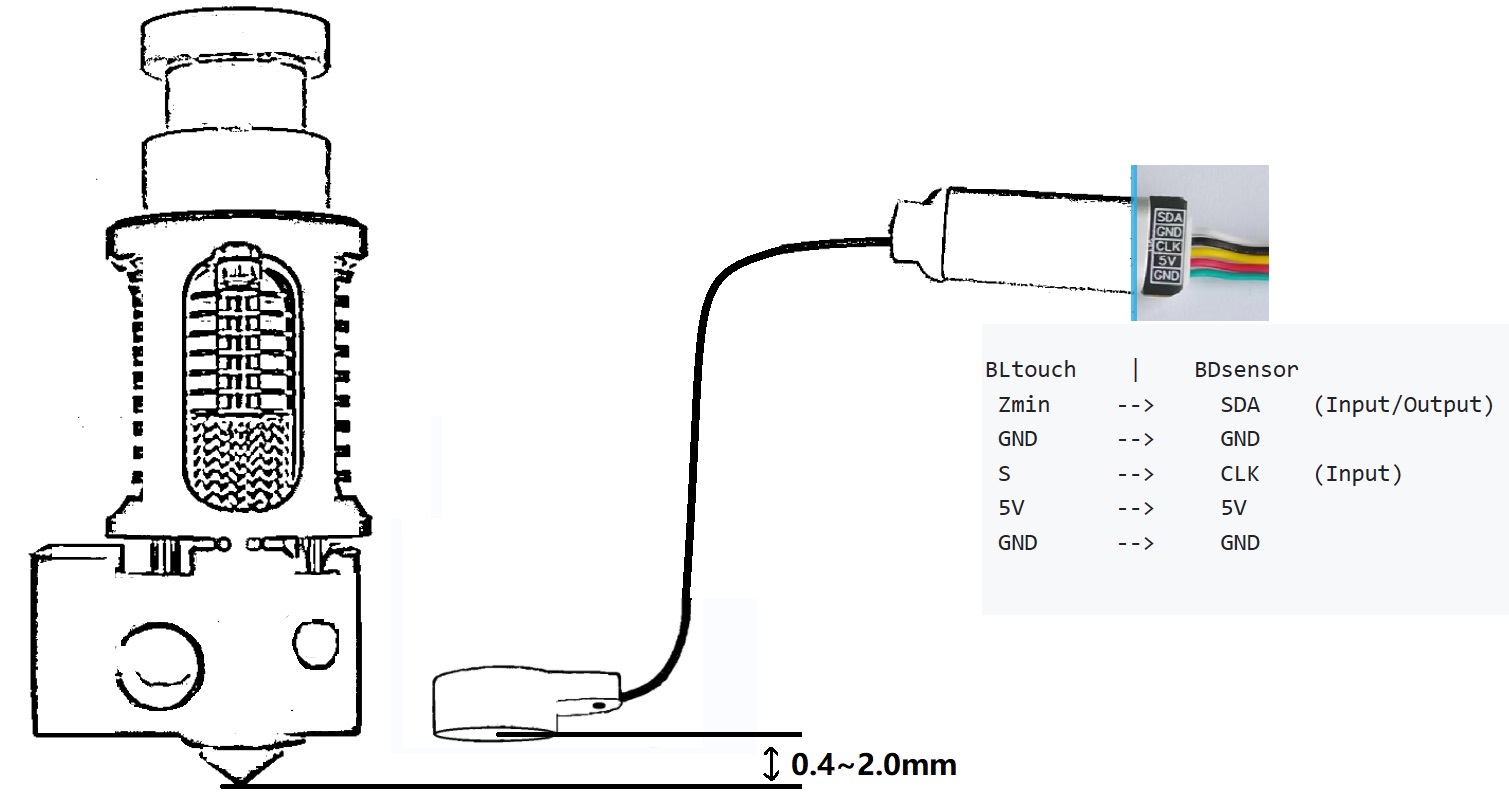
the wires CKL and SDA of BDsensor can be connected to any GPIO pins of your board. You can also connect the BDsensor cable into the Bltouch port directly (except all the boards from MKS), for example:
BLtouch | BDsensor
GND --> GND
5V --> 5V
S --> CLK/SCL (Input)
GND --> GND
Zmin --> SDA (Input/Output)
Since some of the pins in the connectors on the mainboard maybe not connected to the gpios of MCU directly (e.g. there maybe a filter capacitor on them or isolated by mosfet, diode or optocoupler, but it’s OK if they are isolated by resistors or pullup/pulldown by resistors), they cannot work with BDsensor. and the firmware will report connection error. For example
https://raw.githubusercontent.com/markniu/Bed_Distance_sensor/new/doc/images/Connection1.jpg
Note: The black cable is original designed for the IPEX wireless antenna, it is a little stiff, please don’t bend it too much.
ssh into your Klipper printer and execute the following commands:
2.1 Download
cd ~
git clone https://github.com/markniu/Bed_Distance_sensor.git
2.2 Install the software
~/Bed_Distance_sensor/klipper/install_BDsensor.sh
cd ~/klipper/
sed -i '/BD_sensor/d' src/Makefile;echo "src-y += BD_sensor.c" >> src/Makefile
make menuconfig
2.3 Compile firmware
make
Make sure there is Compiling out/src/BD_sensor.o on the SSH while make.
If you don’t want to see the “dirty” on the mainsail, you can run ./make_with_bdsensor.sh instead of make
2.3 Flash firmware
Flash firmware into the MCU or the CANbus toolhead board which the BDsensor connected.
make flash
Different boards have different configuration in the steps make menuconfig and make flash, please read the document of the board from the factory, we didn’t change any of that.
2.4 BDsensor update (Optional)
If you update the klipper later and don’t forget to update BDsensor too.
you can update the code of BDsensor by command:
cd ~/Bed_Distance_sensor/
git fetch --all && git reset --hard origin/new && git pull
or by the Moonraker Update Manager:
Add the following section to moonraker.conf if your printer is running Moonraker.and then you can update the BDsensor with 1 click via the web page or klipperscreen.
[update_manager BDsensor]
type: git_repo
primary_branch: new
channel: dev
path: ~/Bed_Distance_sensor
origin: https://github.com/markniu/Bed_Distance_sensor.git
install_script: ./klipper/install_BDsensor.sh
is_system_service: False
managed_services: klipper
info_tags:
desc=Bed Distance Sensor
2.5. How to Revert to the previous version(Optional)
Please ignore this if you are installing for the first time.git reset --hard HEAD~1 that can revert it to the previous version.HEAD~1 is the last commit. If you want to rollback 3 commits you could use HEAD~3. If you want to rollback to a specific revision number, you could also do that using its SHA hash.
[BDsensor]Paste the following [BDsensor] section into your printer.cfg
Modify the sda_pin and scl_pin to yours, also do not forgot to disable other probe section like [bltouch] or [probe].
[BDsensor]
# Don't use aliases for the board pins
sda_pin: PB1 # example of connecting to main board Creality V4.2.7
scl_pin: PB0
#scl_pin:MKS_THR:gpio20 # example of connecting to CAN module like MKS THR42
#sda_pin:MKS_THR:gpio11
#scl_pin:host:gpio17 # example of connecting to GPIO on RaspberryPi
#sda_pin:host:gpio27
delay: 10 # you can set it 10 if the BDsensor version is >=1.2
z_offset:0 # within -0.6 to 0.6mm
x_offset: -34
y_offset: 0
no_stop_probe: # fast probe that the toolhead will not stop at the probe point,disable it by commenting out.
position_endstop: 1.2 #the triggered position, recommend value is 1~2.8
collision_homing:0 # set it 1 to enable homing with nozzle collision sensing.
collision_calibrate:0 # set it 1 to enable auto calibrate BDsensor with nozzle collision sensing.
#QGL_Tilt_Probe:0 # set 1 to enable probe up and down when do quad_gantry_level,default is 1
speed:3 # this speed only works for the z tilt and PROBE_ACCURACY command.
homing_cmd: G28 # needed by the auto calibration.the default is G28, please set it G990028 if there has [gcode_macro G28]
[stepper_z]endstop_pin;position_endstop;[stepper_z]
endstop_pin: probe:z_virtual_endstop
#position_endstop: 0.5
homing_speed: 5
second_homing_speed: 3 #set this to 3 if homing with collision
homing_retract_speed: 2
homing_retract_dist:5
...
[safe_z_home],[bed_mesh], [force_move] in your printer.cfg .horizontal_move_z to 1 in section [bed_mesh] and [quad_gantry_level].[safe_z_home]
z_hop: 5
...
[bed_mesh]
horizontal_move_z:1 # 0.7~1.0mm is recommended
algorithm: bicubic # this should be bicubic if the bed mesh points count is > 6*6
...
[quad_gantry_level]
horizontal_move_z:1 # 0.7~1.0mm is recommended
...
[force_move]
enable_force_move: true # required by the command SET_KINEMATIC_POSITION in the calibration step below.
Test video: https://www.youtube.com/watch?v=IZf-PunQ6v8
Paste the following macro into your cfg file.
For Z Tilt:
[gcode_macro Z_TILT_ADJUST]
rename_existing: _Z_TILT_ADJUST
description:
gcode:
#run z tilt with z move up and down at first
BDSENSOR_SET QGL_TILT_PROBE=1 #set this 1 to enable z axis up and down
BDSENSOR_SET COLLISION_HOMING=0
_Z_TILT_ADJUST horizontal_move_z=6 retry_tolerance=1
G28 Z0
#run z tilt with no z move up and down
BDSENSOR_SET QGL_TILT_PROBE=0 #set this 0 to disable z axis up and down while probe
_Z_TILT_ADJUST horizontal_move_z=1 retry_tolerance=0.04
#BDSENSOR_SET COLLISION_HOMING=1 #optional
G28 Z0
For quad_gantry_level:
[gcode_macro QUAD_GANTRY_LEVEL]
rename_existing: _QUAD_GANTRY_LEVEL
description:
gcode:
#run z tilt with z move up and down at first
BDSENSOR_SET QGL_TILT_PROBE=1 #set this 1 to enable z axis up and down
BDSENSOR_SET COLLISION_HOMING=0
_QUAD_GANTRY_LEVEL horizontal_move_z=6 retry_tolerance=1
G28 Z0
#run z tilt with no z move up and down
BDSENSOR_SET QGL_TILT_PROBE=0 #set this 0 to disable z axis up and down while probe
_QUAD_GANTRY_LEVEL horizontal_move_z=1 retry_tolerance=0.04
#BDSENSOR_SET COLLISION_HOMING=1 #optional
G28 Z0
[bed_mesh]
horizontal_move_z:1 # 0.7~1.0mm is recommended
zero_reference_position: 150, 160 # Set this value to be the same as home_xy_position that is in the section safe_z_home
....
[printer]
kinematics: delta
max_velocity: 300
max_accel: 3000
max_z_velocity: 150
[BDsensor]
scl_pin:PB6
sda_pin:PB7
delay: 20
z_offset:0 # this `z_offset` must be set to 0.
x_offset: 0
y_offset: 0
samples:1
no_stop_probe: # enable this for fast probe, the toolhead will not stop at the probe point.
position_endstop: 0.5 # the Z axis will stop at this position (mm) while homing z, recommend value is 0.4~1.0
[bed_mesh]
speed: 200
horizontal_move_z: 1
mesh_radius: 80
mesh_origin: 0, 0
round_probe_count: 5
[delta_calibrate]
radius:100
horizontal_move_z: 20
speed:5
[force_move]
enable_force_move: true # must true, required in the calibration step below.
Don’t forget to run DELTA_CALIBRATE before running BED_MESH_CALIBRATE
M102 S-1 # gcode command to read sensor information
M102 S-2 # gcode command to get one distance value in millimeter
M102 S-7 # put a metal close to the sensor about 1mm,and send this command to get one distance value in raw (0~1015),
Please check the connection by M102 S-1. Here is an example of the returned message:
Send: M102 S-1
Recv: V1.0 pandapi3d.com
please check the connection and wire order if it returns blank, make sure there is no signal filter capacitor or diode on the GPIO.
Check the mount distance of the bdsensor to the nozzle
SET_KINEMATIC_POSITION Z=100 M102 S-7, make sure the data returned is in the range(50~350), otherwise please adjust the distance by mounting the sensor again.The closer the sensor to the bed, the smaller the value.There are two ways:
Make sure the collision_homing:0 and collision_calibrate:0 in the section [BDsensor]
Clean the nozzle
Manual move the Z axis down in the menu until the nozzle just touches the bed plate or with paper, the BDsensor will use this position as the zero position.
Send calibration command M102 S-6.
After that you can check whether the BDsensor has been calibrated successful by M102 S-5 that will return the raw calibration data which stored in the BDsensor. If the first raw calibration data returned by the M102 S-5 is greater than 400, that means the sensor is mounted too high and needs to be remounted closer to the bed, the recommend value of first data is around 100. also make sure that the value of second data is greater than the first data by more than 10, else adjust the height of z and do calibarte again.
Make sure the collision_homing:1 and collision_calibrate:1 in the section [BDsensor]
Clean the nozzle
Send calibration command M102 S-6. it will auto home the printer and then calibrate the sensor.
If the first raw calibration data returned by the M102 S-5 is greater than 400, that means the sensor is mounted too high and needs to be remounted closer to the bed, the recommend value of first data is 100~300. also make sure that the value of second data is greater than the first data by more than 10
Make sure the line of the sensor and the nozzle is parallel with the bed, and recommend to calibrated it again after doing z tilt or QGL.
Check z_offset by moving the Z (G1 Z0) to zero after homing. Then, see if the nozzle is too high or too close to the bed.
G28
G1 Z0
Adjust the nozzle with G1 code for example:
If you find that the actual nozzle zero position is 0.05 after G1 Z0.05, it means the nozzle is too close to the bed. You need to set the z_offset:-0.05 in the printer.cfg.
or if you find the actual nozzle zero postion is -0.03 after G1 Z-0.03, it means the nozzle is too high to the bed, need to set the z_offset:0.03 in the printer.cfg.
Of course you can adjust the z_offset while printing in the mainsail or fluidd page. Then run save_config to save it into the printer.cfg
Ignore this step if you use the collision_homing:1 (contact home), because the endstop read command M119 doesn’t work in this contact mode.
Please do not Homing Z until you have checked this step or else the nozzle maybe cashes the printer bed.
Send M119 command(Reporting endstop status).
Send: M119
Recv: x:open y:open z:open
Put a metal piece close enough to the sensor, send M119 again.
Send: M119
Recv: x:open y:open z:TRIGGERED
If all above steps are right, then you can homing z axis now.
G28
G1 Z1
waiting the toolhead stops then
M102 S-2
G1 Z0 after G28, if not please calibrate again.Gcode Command for BDsensor:
BDSENSOR_VERSION # Alias to M102 S-1 , read the version of BDsensor
BDSENSOR_CALIBRATE # Alias to M102 S-6 , calibrate the BDsensor
BDSENSOR_READ_CALIBRATION # Alias to M102 S-5 , read the raw calibrate data
BDSENSOR_DISTANCE # Alias to M102 S-2 , read the distance value measured by BDsensor
M102 S-7 # get one distance value in raw (0~1015)
you can find/search more troubleshooting from other users here https://github.com/markniu/Bed_Distance_sensor/issues
Happy printing!
{kind=link}